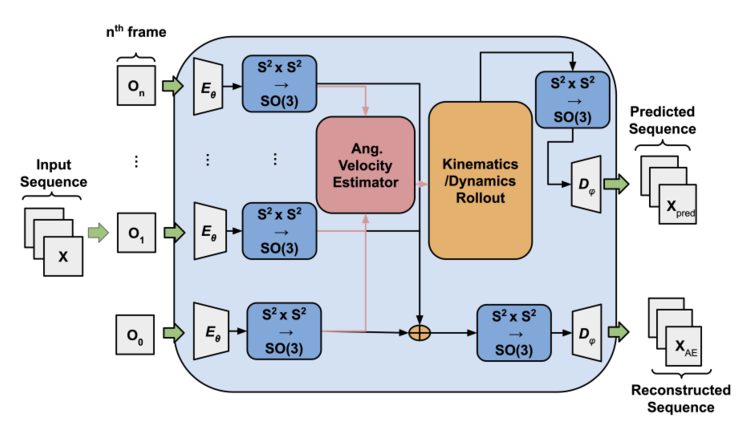
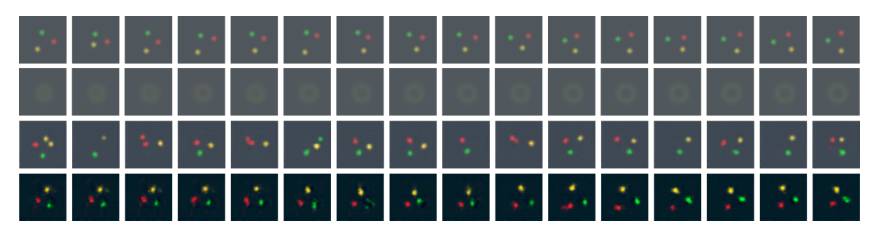
Rigid Body Neural Network
In many real-world settings, image observations of freely rotating 3D rigid bodies, such as satellites, may be available when low-dimensional measurements are not. However, the high-dimensionality of image data precludes the use of classical estimation techniques to learn the dynamics and a lack of interpretability reduces the usefulness of standard deep learning methods. In this work, we present a physics-informed neural network model to estimate and predict 3D rotational dynamics from image sequences. We achieve this using a multi-stage prediction pipeline that maps individual images to a latent representation homeomorphic to SO(3), computes angular velocities from latent pairs, and predicts future latent states using the Hamiltonian equations of motion with a learned representation of the Hamiltonian. We demonstrate the efficacy of our approach on a new rotating rigid-body dataset with sequences of rotating cubes and rectangular prisms with uniform and non-uniform density.
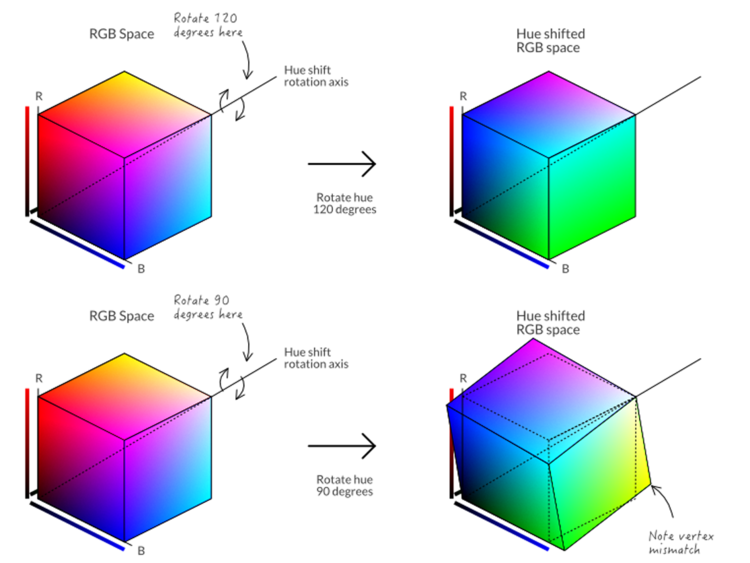
Color Equivariant Neural Network
Group equivariant convolutional neural networks have been designed for a variety of geometric transformations from 2D and 3D rotation groups, to semi-groups such as scale. Despite the improved interpretability, accuracy and generalizability afforded by these architectures, group equivariant networks have seen limited application in the context of perceptual quantities such as hue and saturation, even though their variation can lead to significant reductions in classification performance. In this paper, we introduce convolutional neural networks equivariant to variations in hue and saturation by design. To achieve this, we leverage the observation that hue and saturation transformations can be identified with the 2D rotation and 1D translation groups respectively. Our hue-, saturation-, and fully color-equivariant networks achieve equivariance to these perceptual transformations without an increase in network parameters. We demonstrate the utility of our networks on synthetic and real world datasets where color and lighting variations are commonplace.
Relational Reasoning on Graphs using Opinion Dynamics
From pedestrians to Kuramoto oscillators, interactions between agents govern how a multitude of dynamical systems evolve in space and time. Discovering how these agents relate to each other can improve our understanding of the often complex dynamics that underlie these systems. Recent works learn to categorize relationships between agents based on observations of their physical behavior. These approaches are limited in that the relationship categories are modelled as independent and mutually exclusive, when in real world systems categories are often interacting. In this work, we introduce a level of abstraction between the physical behavior of agents and the categories that define their behavior. To do this, we learn a mapping from the agents’ states to their affinities for each category in a graph neural network. We integrate the physical proximity of agents and their affinities in a nonlinear opinion dynamics model which provides a mechanism to identify mutually exclusive categories, predict an agent’s evolution in time, and control an agent’s behavior. We demonstrate the utility of our model for learning interpretable categories for mechanical systems, and demonstrate its efficacy on several long-horizon trajectory prediction benchmarks where we consistently out perform existing methods.
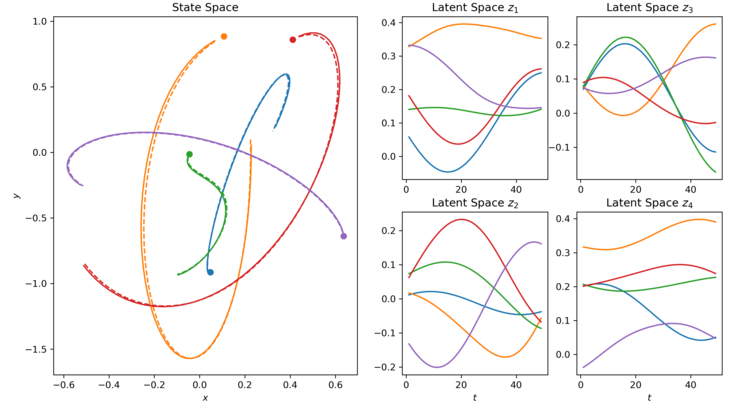
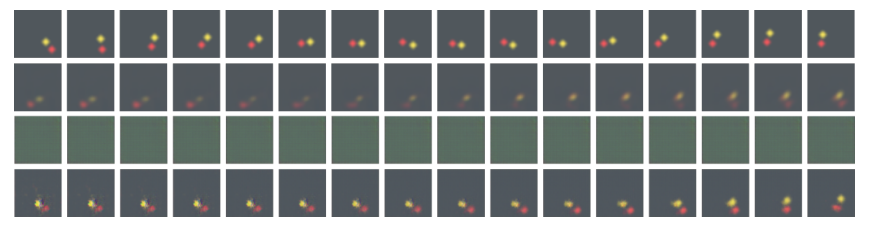
Hamiltonian GAN
A growing body of work leverages the Hamiltonian formalism as an inductive bias for physically plausible neural network based video generation. The structure of the Hamiltonian ensures conservation of a learned quantity (e.g., energy) and imposes a phase-space interpretation on the low-dimensional manifold underlying the input video. While this interpretation has the potential to facilitate the integration of learned representations in downstream tasks, existing methods are limited in their applicability as they require a structural prior for the configuration space at design time. In this work, we present a GAN-based video generation pipeline with a learned configuration space map and Hamiltonian neural network motion model, which allow us to learn a representation of the configuration space from data. We train our model with a physics-inspired cyclic-coordinate loss function which encourages a minimal representation of the configuration space and improves interpretability. We demonstrate the efficacy and advantages of our approach on the Hamiltonian Dynamics Suite Toy Physics dataset.

Nonlinear Opinion Dynamics Graph Neural Network
Previous works, such and Graph Neural Diffusion (GRAND) and Kuramoto Graph Neural Network (KuramotoGNN), have pointed out that the Graph Neural Networks (GNNs) can be regarded as discretisations of a continuous dynamics process with its underlying Partial Differential Equation (PDE). By learning the dynamics parameters, it has been shown that we can dramatically mitigate the over-smoothing phenomenon. However, the existing models only leveraged adjacency property between nodes, which in our perspective is not expressive enough. Here, we present the Nonlinear Opinion Dynamics Graph Neural Network (NOD-GNN) as a novel class of GNNs to map the Graph features into Opinion space, whose dynamics could be concluded by a novel PDE model called Opinion Dynamics (OD) in decision-making area. The first advantage of our model is, the design of Opinion Dynamics guarantees the existence of equilibria, allowing us to keep divergences when the number of layer increases. Additionally, we add the interpretability to the model we learned, understanding how the nodes evolve along the time. We conducted experiments to demonstrate that our model outperforms several baseline GNNs while maintaining low levels of over-smoothing.