Welcome to the Allen-Blanchette Group!
We design neural network architectures with physical constraints to learn interpretable representations and generalizable solutions.
Our Research
News
We propose a new approach to vision-based dexterous grasp translation, which aims to transfer grasp intent across robotic hands with differing morphologies. Given a visual observation of a source hand grasping an object, our goal is to synthesize a functionally equivalent grasp for a target hand without requiring paired demonstrations or hand…
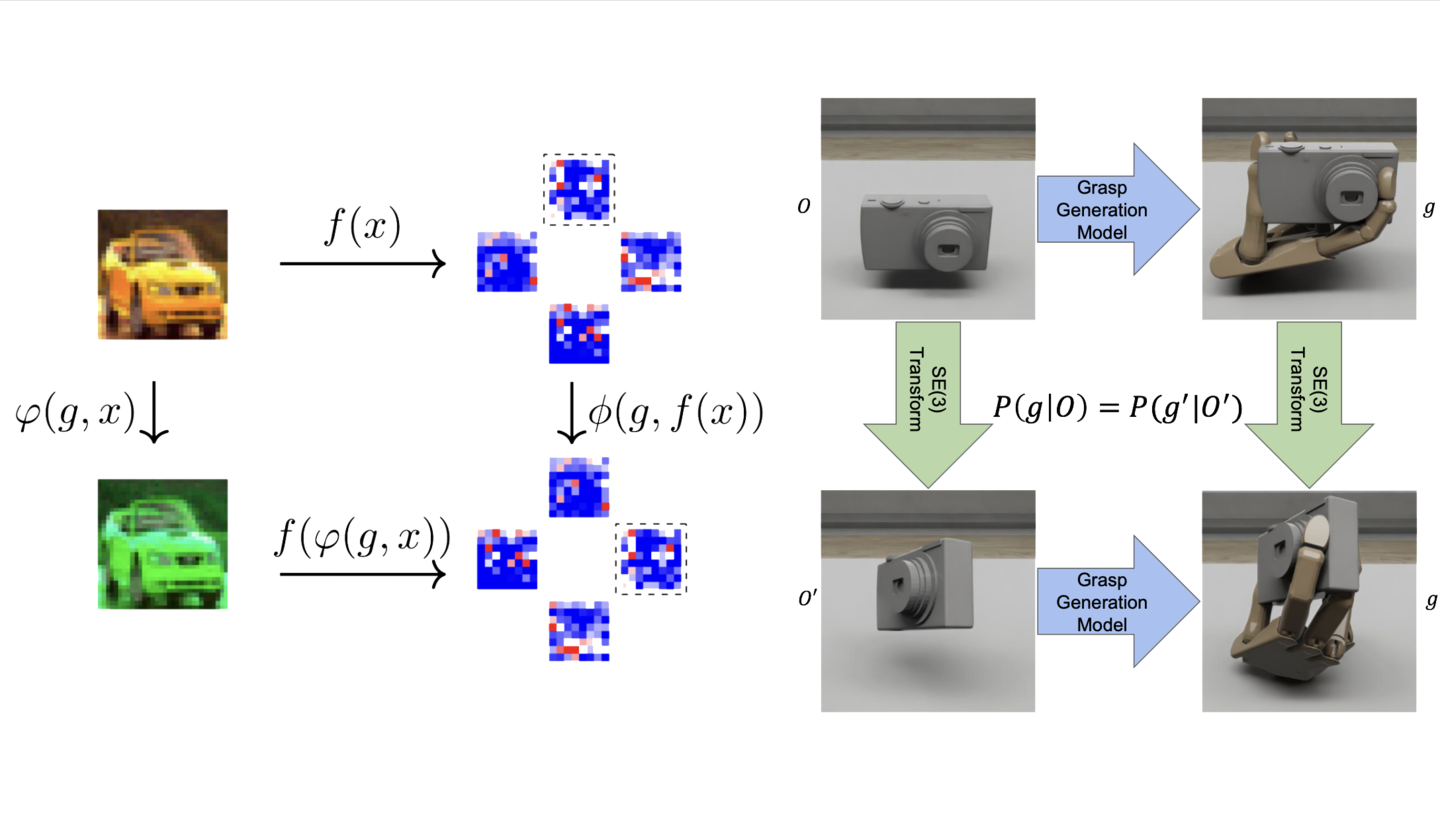
We propose a novel framework for dexterous grasp generation that leverages geometric algebra representations to enforce equivariance to SE(3) transformations. By encoding the SE(3) symmetry constraint directly into the architecture, our method improves data and parameter efficiency, while enabling robust grasp generation across diverse object…
In this paper, we introduce group convolutional neural networks (GCNNs) equivariant to color variation. GCNNs have been designed for a variety of geometric transformations from 2D and 3D rotation groups, to semi-groups such as scale. Despite the improved interpretability, accuracy and generalizability of these architectures, GCNNs have seen…